
Segway
buildbuildbuildbuildbuild
terminalterminalterminalterminalterminal
Der Segway-Roboter entstand in einer Studienarbeit im Fachbereich Informatik zunächst für die Generation NXT 2.0 von LEGO Mindstorms. Mittlerweile wurde der Roboter auf die aktuelle Generation EV3 portiert. Er besitzt die technischen Eigenschaften eines Segway® Personal Transporter (PT) und balanciert mithilfe eines Gyroskops auf zwei Rädern. Dabei folgt er dem physikalischen Prinzip des inversen Pendels.
Beim inversen Pendel liegt der Schwerpunkt oberhalb einer Achse bzw. Standfläche. Bewegungen bringen das Pendel aus dem Gleichgewicht, sodass eine Gegenbewegung
erforderlich ist, um dieses wiederherzustellen bzw. zu erhalten. Vgl. Fritz Tröster: Steuerungs-und Regelungstechnik für Ingenieure. 2. Auflage. Oldenbourg Verlag, 2005.
Der Ultraschallsensor dient zur Objekterkennung, damit der Roboter beim Geradeausfahren Hindernissen ausweichen kann. Den Abstand vom Ultraschallsensor zum Hindernis und die Richtung fürs Ausweichen kannst du im Programmcode selbst festlegen.
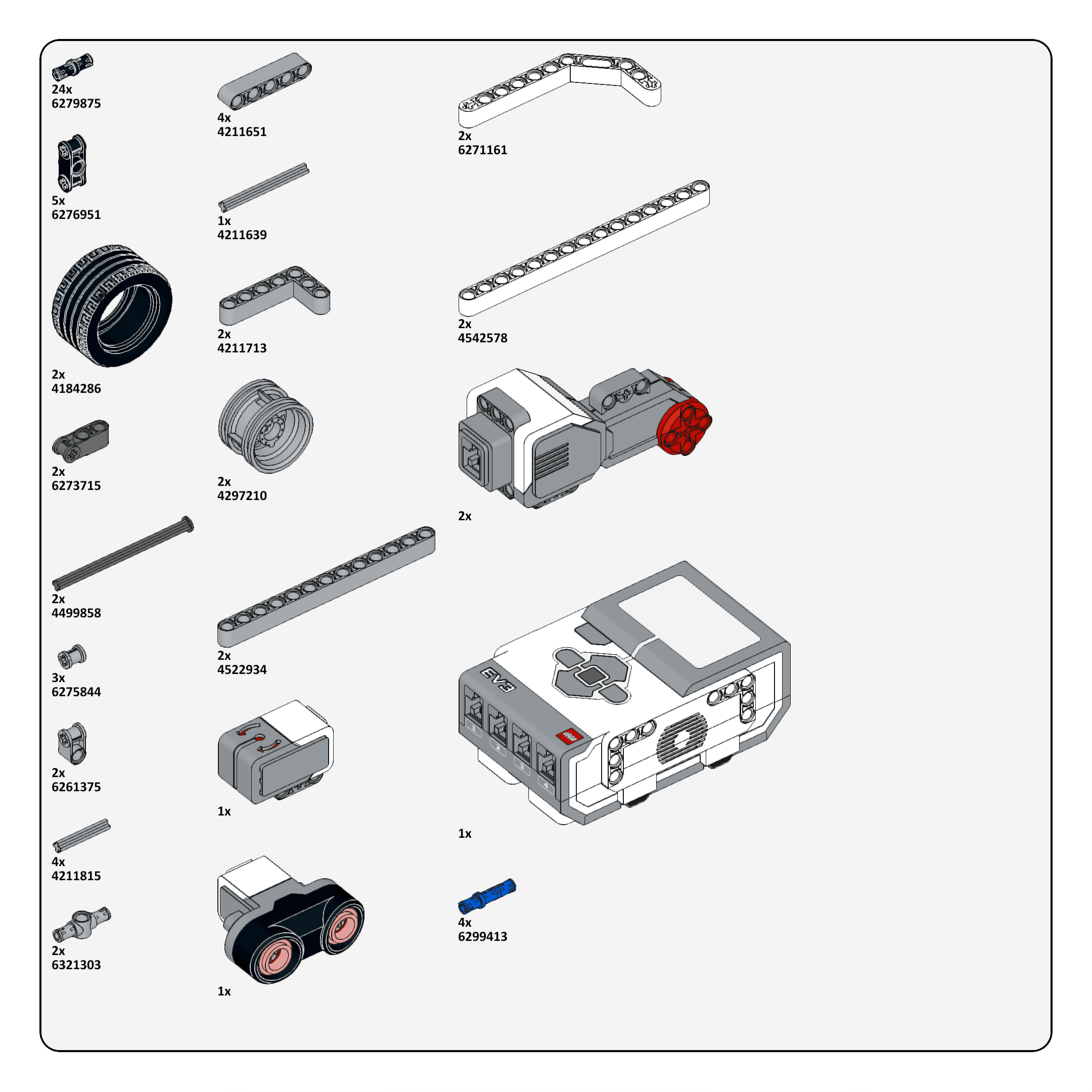
Benötige Bauteile
Bevor du mit dem Zusammenbau anfangen kannst, besorge dir zunächst alle Bauteile, die wir für dich aufgelistet haben.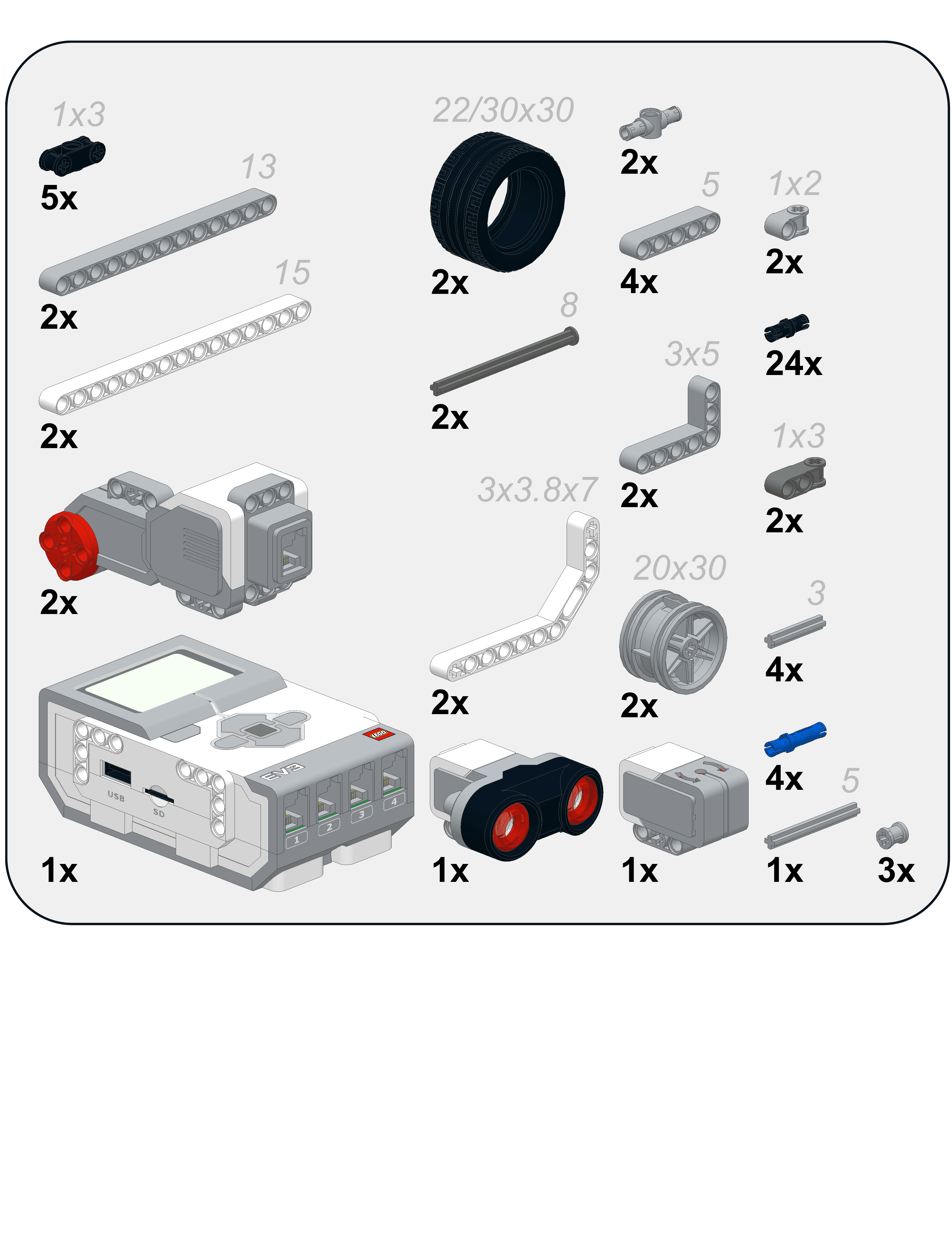
{kind=link}